Many applications for cooperative multi-agent networks
require the agents to arrange themselves into some spatial
pattern. This can include alignment of orientations and velocities for flocking behaviors, or specific formations like
spacecraft constellations for sensing or vehicle platoons for
autonomous driving. The formation control problem seeks to design distributed control strategies for each agent that ensure the entire ensemble can arrange into the desired formation.
A fundamental challenge for solving the formation control problem relates to the sensing and control architecture for the multi-agent system. Our approach is to leverage results from rigidity theory. Rigidity theory studies the solution of a set of geometric constraints on a discrete configuration of points in an Euclidean space. These constraints can include distance or
bearing constraints between pairs of points. Of interest in
rigidity theory is to determine whether the set of polynomial
equations representing these constraints (i) has a solution
(independence); (ii) has locally isolated solutions (rigidity); or (iii) has exactly one solution in the given space up to isometric motions (global rigidity).
Our research explores various aspects of rigidity theory and formation control. Topics include:
- Formation control using bearing sensing and bearing rigidity theory.
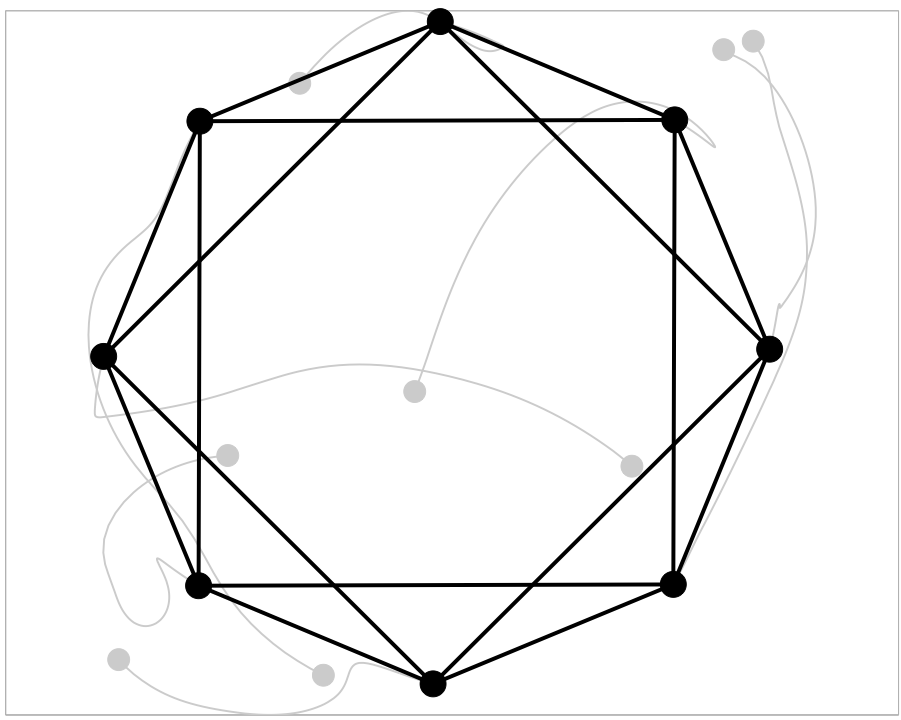
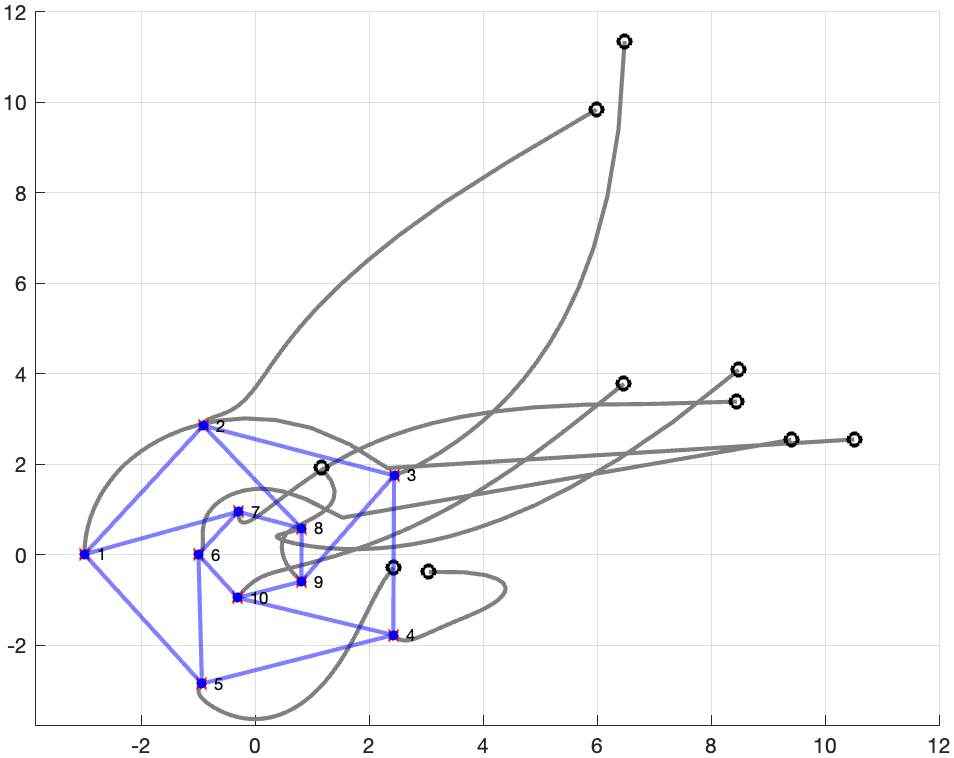
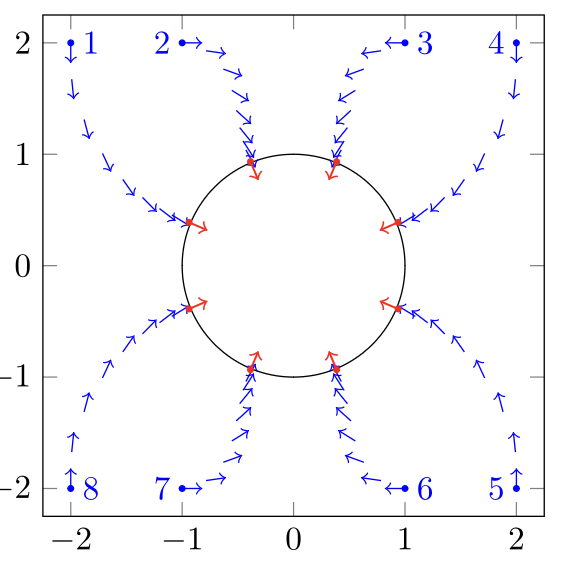
- Alternative architectures exploiting symmetry found in formations.
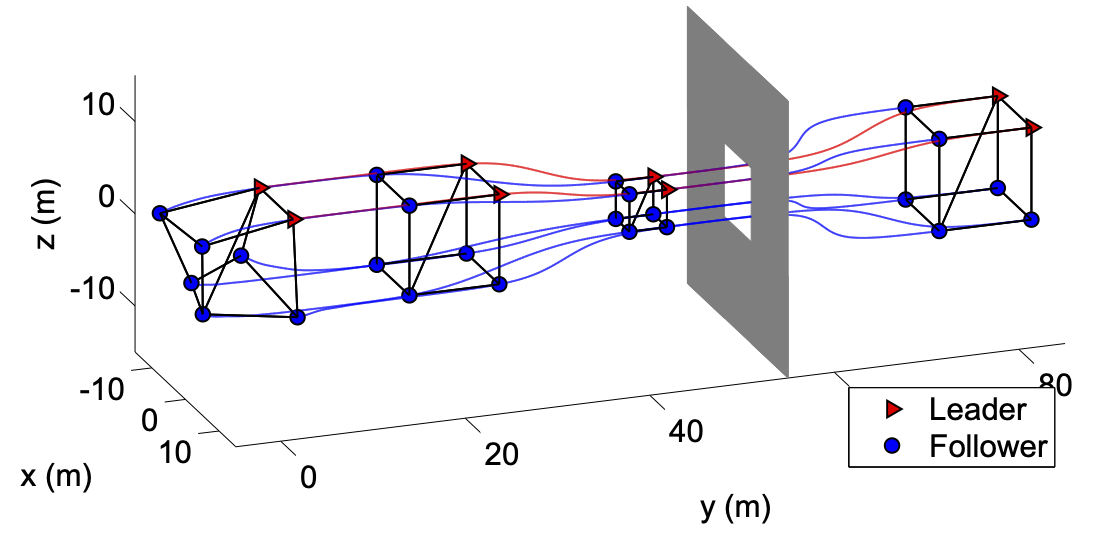
- Dynamic controllers to ensure the rigidity property is maintained in a multi-robot formation with uncertain environments.
- Formations consisting of heterogeneous agent types with different sensing capabilities.
Related Publications:
- Z. Martinez and D. Zelazo, “Formation Control via Rotation Symmetry Constraints,” in American Control Conference, New Orleans, LA, USA, May 2026.



@inproceedings{Martinez2026_ACC,
archiveprefix = {arXiv},
author = {Martinez, Zamir and Zelazo, Daniel},
booktitle = {American Control Conference},
address = {New Orleans, LA, USA},
eprint = {2510.00676},
researchtopic = {formationcontrol},
title = {Formation Control via Rotation Symmetry Constraints},
arxiv = {https://arxiv.org/abs/2510.00676},
year = {2026},
month = may,
pdf = {/Publications/Martinez_ACC26.pdf}
}
- S. Goldgraber Casspi and D. Zelazo, “The Geometry of Transmission Zeros in Distance-Based Formations,” Mar. 2026.
@techreport{GoldgraberCasspi_LCSS26,
archiveprefix = {arXiv},
author = {Goldgraber Casspi, Solomon and Zelazo, Daniel},
eprint = {2603.15993},
journal = {arXiv},
researchtopic = {formationcontrol},
title = {The Geometry of Transmission Zeros in Distance-Based Formations},
arxiv = {https://arxiv.org/abs/2603.15993},
year = {2026},
month = mar,
pdf = {/Publications/GoldgraberCasspi_LCSS26.pdf}
}
- L. Theran, D. Zelazo, and J. Sidman, “A Geometric View of Formation Control with Application to Directed Sensing,” Dec. 2025.
@techreport{Theran_IFAC26,
archiveprefix = {arXiv},
author = {Theran, Louis and Zelazo, Daniel and Sidman, Jessica},
eprint = {2512.06195},
journal = {arXiv},
researchtopic = {formationcontrol},
title = {A Geometric View of Formation Control with Application to Directed Sensing},
arxiv = {https://arxiv.org/abs/2512.06195},
year = {2025},
month = dec,
pdf = {/Publications/Theran_IFAC26.pdf}
}
- Z. Martinez and D. Zelazo, “Symmetry-Based Formation Control on Cycle Graphs Using Dihedral Point Groups,” Dec. 2025.
@techreport{Martinzez_IFAC26,
archiveprefix = {arXiv},
author = {Martinez, Zamir and Zelazo, Daniel},
eprint = {2512.06733},
journal = {arXiv},
researchtopic = {formationcontrol},
title = {Symmetry-Based Formation Control on Cycle Graphs Using Dihedral Point Groups},
arxiv = {https://arxiv.org/abs/2512.06733},
year = {2025},
month = dec,
pdf = {/Publications/Martinez_IFAC26.pdf}
}
- S. Goldgraber Casspi and D. Zelazo, “The Geometry of Hidden Modes in Distance-Based Formation Control,” Nov. 2025.
@techreport{GoldgraberCasspi_IFAC26,
archiveprefix = {arXiv},
author = {Goldgraber Casspi, Solomon and Zelazo, Daniel},
eprint = {2511.13187},
journal = {arXiv},
researchtopic = {formationcontrol},
title = {The Geometry of Hidden Modes in Distance-Based Formation Control},
arxiv = {https://arxiv.org/abs/2511.13187},
year = {2025},
month = nov,
pdf = {/Publications/GoldgraberCasspi_IFAC26.pdf}
}
- J. Shi and D. Zelazo, “Extending the Leader-First Follower Structure for Bearing-only Formation Control on Directed Graphs,” IEEE Transactions on Control of Network Systems, 1–12, 2025.

@article{Shi2025_TCNS,
journal = {IEEE Transactions on Control of Network Systems},
title = {Extending the Leader-First Follower Structure for Bearing-only Formation Control on Directed Graphs},
year = {2025},
month = oct,
volume = {},
number = {},
pages = {1-12},
author = {Shi, Jiacheng and Zelazo, Daniel},
doi = {10.1109/TCNS.2025.3626655},
researchtopic = {formationcontrol},
pdf = {/Publications/Shi_TCNS2025.pdf}
}
- Z. Martinez, “Symmetry-Constrained Formation Maneuvering,” in IAAC Workshop: Graduate Students in Systems and Control, Haifa, Israel, Jul. 2025.

@inproceedings{Martinez_GSC2025,
author = {Martinez, Zamir},
year = {2025},
month = jul,
title = {Symmetry-Constrained Formation Maneuvering},
address = {Haifa, Israel},
booktitle = {IAAC Workshop: Graduate Students in Systems and Control},
keywords = {conference},
researchtopic = {formationcontrol},
slides = {/Talks/GSC2025_Martinez.pdf}
}
- D. Zelazo, S.-ichi Tanigawa, and B. Schulze, “Forced Symmetric Formation Control,” IEEE Transactions on Control of Network Systems, 12(2):1415–1426, 2025.
@article{zelazo2025TCNS,
author = {Zelazo, Daniel and Tanigawa, Shin-ichi and Schulze, Bernd},
journal = {IEEE Transactions on Control of Network Systems},
title = {Forced Symmetric Formation Control},
year = {2025},
volume = {12},
number = {2},
month = jun,
pages = {1415-1426},
keywords = {journal},
researchtopic = {formationcontrol},
url = {https://ieeexplore.ieee.org/document/10824888},
doi = {10.1109/TCNS.2025.3525814},
pdf = {/Publications/Zelazo_TCNS2015.pdf}
}
- Z. Martinez and D. Zelazo, “Symmetry-Constrained Formation Maneuvering,” in 64th Israel Annual Conference on Aerospace Sciences, Haifa, Israel, Mar. 2025.
@inproceedings{Martinez2025_IACAS,
address = {Haifa, Israel},
author = {Martinez, Zamir and Zelazo, Daniel},
booktitle = {64th Israel Annual Conference on Aerospace Sciences},
keywords = {conference},
month = mar,
pages = {},
researchtopic = {formationcontrol},
title = {Symmetry-Constrained Formation Maneuvering},
year = {2025},
slides = {/Talks/Martinez_IACAS25.pdf},
pdf = {/Publications/Martinez_IACAS2025.pdf}
}
- C. Xu, D. Zelazo, and B. Wu, “Distributed Prescribed-Time Coordinated Control of Spacecraft Formation Flying under Input Saturation,” Advances in Space Research, 74(5):2302–2315, 2024.
@article{Xu2023b_J,
author = {Xu, Chuang and Zelazo, Daniel and Wu, B},
doi = {https://doi.org/10.1016/j.asr.2024.05.077},
journal = {Advances in Space Research},
month = sep,
note = {early access},
number = {5},
pages = {2302--2315},
researchtopic = {formationcontrol, space},
title = {Distributed Prescribed-Time Coordinated Control of Spacecraft Formation Flying under Input Saturation},
url = {https://www.sciencedirect.com/science/article/pii/S027311772400543X},
volume = {74},
year = {2024},
pdf = {/Publications/Xu_ASR2024.pdf}
}
- C. Xu, D. Zelazo, and B. Wu, “Bearing-based formation control of second-order multiagent systems with bounded disturbances,” International Journal on Robust and Nonlinear Control, 34(1):167–199, 2024.
@article{Xu2023a_J,
author = {Xu, Chuang and Zelazo, Daniel and Wu, B},
doi = {https://doi.org/10.1002/rnc.6966},
journal = {International Journal on Robust and Nonlinear Control},
keyword = {journal},
month = aug,
number = {1},
pages = {167-199},
researchtopic = {formationcontrol},
title = {Bearing-based formation control of second-order multiagent systems with bounded disturbances},
volume = {34},
year = {2024},
pdf = {/Publications/Xu_IJRNC2024.pdf}
}
- J. Shi and D. Zelazo, “Bearing-only Formation Control with Directed Sensing,” in 63rd Israel Annual Conference on Aerospace Sciences, Haifa, Israel, May 2024.
@inproceedings{Shi_IACAS2024,
address = {Haifa, Israel},
author = {Shi, Jiacheng and Zelazo, Daniel},
booktitle = {63rd Israel Annual Conference on Aerospace Sciences},
keywords = {conference, consensus},
month = may,
year = {2024},
pages = {},
researchtopic = {nds, formationcontrol},
title = {{Bearing-only Formation Control with Directed Sensing}},
slides = {/Talks/Shi_IACAS2024.pdf},
pdf = {/Publications/Shi_IACAS2024.pdf}
}
- M. Sewlia and D. Zelazo, “Bearing-Based Formation Stabilization Using Event-Triggered Control,” International Journal on Robust and Nonlinear Control, 34(6):4375–4387, 2024.
@article{Sewlia2023a_J,
author = {Sewlia, Mayank and Zelazo, Daniel},
doi = {10.1002/rnc.7185},
journal = {International Journal on Robust and Nonlinear Control},
keyword = {journal},
month = jan,
volume = {34},
number = {6},
pages = {4375--4387},
researchtopic = {formationcontrol, eventtrigger},
title = {Bearing-Based Formation Stabilization Using Event-Triggered Control},
year = {2024},
url = {https://onlinelibrary.wiley.com/doi/10.1002/rnc.7185},
pdf = {/Publications/Sewlia_IJRNC2022.pdf}
}
- J. Shi, “Bearing-only Formation Control with Directed Sensing,” mastersthesis, Technion - Israel Institute of Technology, Autonomous Systems and Robotics, 2024.
@thesis{Shi2024,
author = {Shi, Jiacheng},
title = {Bearing-only Formation Control with Directed Sensing},
school = {Technion - Israel Institute of Technology, Autonomous Systems and Robotics},
year = {2024},
type = {mastersthesis},
researchtopic = {thesis, formationcontrol},
pdf = {/Theses/Thesis_Shi.pdf}
}
- Z. Sun, S. Zhao, and D. Zelazo, “Characterizing bearing persistence in directed graphs,” in IFAC World Congress, Yokohama, Japan, Jul. 2023.

@inproceedings{Sun2023a_C,
address = {Yokohama, Japan},
author = {Sun, Zhiyong and Zhao, Shiyu and Zelazo, Daniel},
booktitle = {IFAC World Congress},
doi = {10.1016/j.ifacol.2023.10.1307},
keywords = {conference},
month = jul,
pages = {},
researchtopic = {formationcontrol},
title = {{Characterizing bearing persistence in directed graphs}},
url = {http://dx.doi.org/10.1016/j.ifacol.2023.10.1307},
year = {2023},
poster = {/Talks/IFAC2023_sun.pdf},
pdf = {/Publications/Sun_IFACWC2023.pdf}
}
- D. Zelazo, B. Shulze, and S.-I. Tanigawa, “Stabilization of Symmetric Formations,” in IFAC World Congress, Yokohama, Japan, Jul. 2023.
@inproceedings{Zelazo2023a_C,
address = {Yokohama, Japan},
author = {Zelazo, Daniel and Shulze, Bernd and Tanigawa, Shin-{I}chi},
booktitle = {IFAC World Congress},
doi = {10.1016/j.ifacol.2023.10.301},
keywords = {conference},
month = jul,
pages = {},
researchtopic = {formationcontrol},
title = {{Stabilization of Symmetric Formations}},
url = {http://dx.doi.org/10.1016/j.ifacol.2023.10.301},
year = {2023},
slides = {/Talks/IFAC2023_zelazo.pdf},
pdf = {/Publications/Zelazo_IFACWC2023.pdf}
}
- M. Fabris and D. Zelazo, “Bearing-based Autonomous Communication Relay Positioning under Field-of-View Constraints,” Advanced Control for Applications, 4(2):e103, 2022.
@article{Fabris2021b_J,
author = {Fabris, Marco and Zelazo, Daniel},
doi = {10.1002/adc2.103},
journal = {Advanced Control for Applications},
keyword = {journal},
month = mar,
number = {2},
pages = {e103},
researchtopic = {formationcontrol},
title = {Bearing-based Autonomous Communication Relay Positioning under Field-of-View Constraints},
url = {http://dx.doi.org/10.1002/adc2.103},
volume = {4},
year = {2022},
pdf = {/Publications/Fabris_ACA2022.pdf}
}
- B. Pozzan, G. Michieletto, A. Cenedese, and D. Zelazo, “Heterogeneous Formation Control: a Bearing Rigidity Approach,” in IEEE Conference on Decision and Control, Austin, Texas, Dec. 2021.
@inproceedings{Pozzan2021a,
address = {Austin, Texas},
author = {Pozzan, Benjamin and Michieletto, Giulia and Cenedese, Angelo and Zelazo, Daniel},
booktitle = {IEEE Conference on Decision and Control},
doi = {10.1109/cdc45484.2021.9683374},
keywords = {conference},
month = dec,
pages = {6451--6456},
researchtopic = {formationcontrol},
title = {{Heterogeneous Formation Control: a Bearing Rigidity Approach}},
url = {http://dx.doi.org/10.1109/cdc45484.2021.9683374},
year = {2021},
pdf = {/Publications/Pozzan_CDC2021.pdf}
}
- G. Michieletto, A. Cenedese, and D. Zelazo, “A Unified Dissertation on Bearing Rigidity Theory,” IEEE Transactions on Control of Network Systems, 8(4):1624–1636, 2021.
@article{Michieletto2021_J,
author = {Michieletto, Giulia and Cenedese, Angelo and Zelazo, Daniel},
doi = {10.1109/TCNS.2021.3077712},
journal = {IEEE Transactions on Control of Network Systems},
keyword = {journal},
number = {4},
pages = {1624-1636},
researchtopic = {formationcontrol},
title = {A Unified Dissertation on Bearing Rigidity Theory},
url = {http://dx.doi.org/10.1109/tcns.2021.3077712},
volume = {8},
year = {2021},
pdf = {/Publications/Michieletto_TCNS2021.pdf}
}
- M. H. Trinh, D. Zelazo, and H.-S. Ahn, “Pointing Consensus and Bearing-Based Solutions to the Fermat–Weber Location Problem,” IEEE Transactions on Automatic Control, 65(6):2339–2354, 2020.
@article{Trinh_TAC2020,
author = {Trinh, Minh Hoang and Zelazo, Daniel and Ahn, Hyo-Sung},
journal = {IEEE Transactions on Automatic Control},
title = {Pointing Consensus and Bearing-Based Solutions to the Fermat–Weber Location Problem},
year = {2020},
volume = {65},
number = {6},
keyword = {journal},
pages = {2339--2354},
researchtopic = {formationcontrol},
doi = {10.1109/TAC.2019.2927932},
url = {https://ieeexplore.ieee.org/document/8758860},
pdf = {/Publications/Trinh_TAC2020.pdf}
}
- M. Sewlia, “Distributed Event-Triggered Control for Multi-Agent Systems with Second-Order Dynamics,” mastersthesis, Technion - Israel Institute of Technology, Aerospace Engineering Department, 2020.
@thesis{Sewlia2020,
author = {Sewlia, Mayank},
title = {Distributed Event-Triggered Control for Multi-Agent Systems with Second-Order Dynamics},
school = {Technion - Israel Institute of Technology, Aerospace Engineering Department},
year = {2020},
type = {mastersthesis},
researchtopic = {thesis, formationcontrol, eventtrigger},
pdf = {/Theses/Thesis_Sewlia.pdf}
}
- T. Ikeda, D. Zelazo, and K. Kashima, “Maximum Hands-Off Distributed Bearing-Based Formation Control,” in IEEE Conference on Decision and Control, Nice, France, Dec. 2019.
@inproceedings{Ikeda2019a,
address = {Nice, France},
author = {Ikeda, Takuya and Zelazo, Daniel and Kashima, Kenji},
booktitle = {IEEE Conference on Decision and Control},
doi = {10.1109/cdc40024.2019.9029574},
keywords = {conference},
month = dec,
pages = {4459--4464},
researchtopic = {formationcontrol, optimization},
title = {{Maximum Hands-Off Distributed Bearing-Based Formation Control}},
url = {http://dx.doi.org/10.1109/cdc40024.2019.9029574},
year = {2019},
pdf = {/Publications/Ikeda_CDC19.pdf}
}
- D. Zelazo and S. Zhao, “Formation Control and Rigidity Theory,” Snapshots of Modern Mathematics from Oberwolfach, (12):1–16, 2019.
@article{Zelazo2019a_J,
author = {Zelazo, Daniel and Zhao, Shiyu},
doi = {10.14760/SNAP-2019-017-EN},
journal = {Snapshots of Modern Mathematics from Oberwolfach},
keyword = {journal},
month = nov,
number = {12},
pages = {1--16},
publisher = {Mathematisches Forschungsinstitut Oberwolfach},
researchtopic = {formationcontrol},
title = {Formation Control and Rigidity Theory},
url = {https://publications.mfo.de/handle/mfo/3689},
year = {2019},
pdf = {/Publications/Zelazo_Oberwolfach2019.pdf}
}
- A. Jain and D. Zelazo, “Temporal Circular Formation Control with Bounded Trajectories in a Uniform Flowfield,” in 27th Mediterranean Conference on Control and Automation, Akko, Israel, Jul. 2019.
@inproceedings{Jain2019a,
address = {Akko, Israel},
author = {Jain, Anoop and Zelazo, Daniel},
booktitle = {27th Mediterranean Conference on Control and Automation},
doi = {10.1109/med.2019.8798531},
keywords = {conference},
month = jul,
pages = {183--188},
researchtopic = {formationcontrol},
title = {{Temporal Circular Formation Control with Bounded Trajectories in a Uniform Flowfield}},
url = {http://dx.doi.org/10.1109/med.2019.8798531},
year = {2019},
slides = {/Talks/MED2019_Jain.pdf},
pdf = {/Publications/Jain_MED19.pdf}
}
- Q. Van Tran, M. H. Trinh, D. Zelazo, D. Mukherjee, and H.-S. Ahn, “Finite-Time Bearing-Only Formation Control via Distributed Global Orientation Estimation,” IEEE Transactions on Control of Network Systems, 6(2):702–712, 2019.
@article{VanTran2019,
title = {Finite-Time Bearing-Only Formation Control via Distributed Global Orientation Estimation},
volume = {6},
issn = {2372-2533},
url = {http://dx.doi.org/10.1109/TCNS.2018.2873155},
doi = {10.1109/tcns.2018.2873155},
number = {2},
journal = {IEEE Transactions on Control of Network Systems},
publisher = {Institute of Electrical and Electronics Engineers (IEEE)},
author = {Van Tran, Quoc and Trinh, Minh Hoang and Zelazo, Daniel and Mukherjee, Dwaipayan and Ahn, Hyo-Sung},
year = {2019},
month = jun,
pages = {702–712},
pdf = {/Publications/Tran_TCNS2019.pdf},
researchtopic = {formationcontrol}
}
- S. Zhao and D. Zelazo, “Bearing Rigidity Theory and its Applications for Control and
Estimation of Network Systems: Life beyond distance rigidity,” IEEE Control Systems Magazine, 39(2):66–83, 2019.
@article{Zhao2017_J,
author = {{Zhao}, S. and {Zelazo}, D.},
doi = {10.1109/mcs.2018.2888681},
journal = {IEEE Control Systems Magazine},
keyword = {journal},
month = apr,
number = {2},
pages = {66-83},
researchtopic = {formationcontrol},
title = {Bearing Rigidity Theory and its Applications for Control and
Estimation of Network Systems: Life beyond distance rigidity},
url = {http://dx.doi.org/10.1109/mcs.2018.2888681},
volume = {39},
year = {2019},
pdf = {/Publications/Zhao_CSM2019.pdf}
}
- M. H. Trinh, S. Zhao, Z. Sun, D. Zelazo, B. D. O. Anderson, and H. Ahn, “Bearing-Based Formation Control of A Group of Agents with Leader-First Follower Structure,” IEEE Transactions on Automatic Control, 64(2):598–613, 2019.
@article{Hoang2016a_J,
author = {Trinh, Minh {H} and Zhao, Shiyu and Sun, Z and Zelazo, Daniel and Anderson, B.D.O. and Ahn, H},
doi = {10.1109/tac.2018.2836022},
journal = {IEEE Transactions on Automatic Control},
month = feb,
number = {2},
pages = {598--613},
researchtopic = {formationcontrol},
title = {Bearing-Based Formation Control of A Group of Agents with Leader-First Follower Structure},
url = {http://dx.doi.org/10.1109/tac.2018.2836022},
volume = {64},
year = {2019},
pdf = {/Publications/Trinh_TAC2019.pdf}
}
- D. Goldenberg, “Cooperative Object Manipulation A Rigidity Approach,” mastersthesis, Technion - Israel Institute of Technology, Aerospace Engineering Department, 2019.
@thesis{Goldenberg2019,
author = {Goldenberg, Douglas},
title = {Cooperative Object Manipulation A Rigidity Approach},
school = {Technion - Israel Institute of Technology, Aerospace Engineering Department},
year = {2019},
type = {mastersthesis},
researchtopic = {thesis, formationcontrol},
pdf = {/Theses/Thesis_Goldenberg.pdf}
}
- D. Frank, D. Zelazo, and F. Allgöwer, “Bearing-Only Formation Control with Limited Visual Sensing: Two Agent Case,” in 7th IFAC Workshop on Distributed Estimation and Control in Networked System , Groningen, The Netherlands, Sep. 2018.
@inproceedings{Frank2018,
address = {Groningen, The Netherlands},
author = {Frank, Daniel and Zelazo, Daniel and Allg\"{o}wer, Frank},
booktitle = {7th IFAC Workshop on Distributed Estimation and Control in Networked System },
doi = {10.1016/j.ifacol.2018.12.006},
keywords = {conference},
month = sep,
pages = {28--33},
researchtopic = {formationcontrol, DFRANK},
title = {{Bearing-Only Formation Control with Limited Visual Sensing: Two Agent Case}},
url = {http://dx.doi.org/10.1016/j.ifacol.2018.12.006},
year = {2018},
pdf = {/Publications/Frank_NecSys18.pdf}
}
- M. H. Trinh, D. Mukherjee, D. Zelazo, and H.-S. Ahn, “Formations on Directed Cycles with Bearing-Only Measurements,” International Journal of Robust and Nonlinear Control, 28(3):1074–1096, 2018.
@article{Hoang2016b_J,
author = {Trinh, Minh {H} and Mukherjee, Dwaipayan and Zelazo, Daniel and Ahn, {H-S}},
doi = {10.1002/rnc.3921},
journal = {International Journal of Robust and Nonlinear Control},
month = feb,
number = {3},
pages = {1074-1096},
researchtopic = {formationcontrol},
title = {Formations on Directed Cycles with Bearing-Only Measurements},
url = {http://dx.doi.org/10.1002/rnc.3921},
volume = {28},
year = {2018},
pdf = {/Publications/Trinh_IJRNC2017.pdf}
}
- Y. Liu, J. M. Montenbruck, D. Zelazo, M. Odelga, S. Rajappa, H. H. Bülthoff, F. Allgöwer, and A. Zell, “A Distributed Control Approach to Formation Balancing and Maneuvering of Multiple Multirotor UAVs,” IEEE Transactions on Robotics, 34(4):870–882, 2018.

@article{Liu_IEEETRo2019,
author = {Liu, Yuyi and Montenbruck, Jan Maximilian and Zelazo, Daniel and Odelga, Marcin and Rajappa, Sujit and Bülthoff, Heinrich H. and Allgöwer, Frank and Zell, Andreas},
journal = {IEEE Transactions on Robotics},
title = {A Distributed Control Approach to Formation Balancing and Maneuvering of Multiple Multirotor UAVs},
year = {2018},
volume = {34},
number = {4},
pages = {870-882},
keywords = {Shape;Robots;Decentralized control;Multi-agent systems;Collision avoidance;Convergence;Prediction algorithms;Aerial robotics;distributed formation control;human–swarm interaction;multiagent systems},
doi = {10.1109/TRO.2018.2853606},
pdf = {/Publications/Liu_IEEETOR2018.pdf},
researchtopic = {robotics, formationcontrol},
video = {https://ieeexplore.ieee.org/ielx7/8860/8437110/8429104/MediaMaterial_TRO2853606.mp4?arnumber=8429104}
}
- D. Frank, “Bearing-only Formation Control with Limited View Constraints,” mastersthesis, University of Stuttgart, 2018.
@thesis{Frank2019,
author = {Frank, Daniel},
title = {Bearing-only Formation Control with Limited View Constraints},
school = {University of Stuttgart},
year = {2018},
type = {mastersthesis},
researchtopic = {thesis, formationcontrol, DFRANK},
pdf = {/Theses/Thesis_Frank.pdf}
}
- M. H. Trinh, D. Mukherjee, D. Zelazo, and H.-S. Ahn, “Finite-time bearing-only formation control,” in IEEE Conference on Decision and Control, Melbourne, Australia, Dec. 2017.
@inproceedings{Trinh2017c,
address = {Melbourne, Australia},
author = {Trinh, M. H. and Mukherjee, D and Zelazo, D and Ahn, H-S},
booktitle = {IEEE Conference on Decision and Control},
doi = {10.1109/cdc.2017.8263876},
keywords = {conference},
month = dec,
pages = {1578--1583},
researchtopic = {formationcontrol},
title = {Finite-time bearing-only formation control},
url = {http://dx.doi.org/10.1109/cdc.2017.8263876},
year = {2017},
pdf = {/Publications/Trinh_CDC17.pdf}
}
- S. Zhao, Z. Sun, D. Zelazo, M. H. Trinh, and H.-S. Ahn, “Laman Graphs are Generically Bearing Rigid in Arbitrary Dimensions,” in IEEE Conference on Decision and Control, Melbourne, Australia, Dec. 2017.
@inproceedings{Zhao2017a,
address = {Melbourne, Australia},
author = {Zhao, Shiyu and Sun, Zhiyong and Zelazo, Daniel and Trinh, M. H. and Ahn, Hyo-Sung},
booktitle = {IEEE Conference on Decision and Control},
doi = {10.1109/cdc.2017.8264151},
keywords = {conference},
month = dec,
pages = {3356--3361},
researchtopic = {formationcontrol},
title = {{Laman Graphs are Generically Bearing Rigid in Arbitrary Dimensions}},
url = {http://dx.doi.org/10.1109/cdc.2017.8264151},
year = {2017},
pdf = {/Publications/Zhao_CDC17.pdf}
}
- J. M. Montenbruck, D. Zelazo, and F. Allgöwer, “Fekete Points, Formation Control, and the Balancing Problem,” IEEE Transactions on Automatic Control, 62(10):5069–5081, 2017.
@article{Montenbruck2016a_J,
author = {{Montenbruck}, J. M. and {Zelazo}, D. and {Allg\"ower}, F.},
doi = {10.1109/tac.2017.2679073},
journal = {IEEE Transactions on Automatic Control},
month = oct,
number = {10},
pages = {5069--5081},
researchtopic = {formationcontrol},
title = {Fekete Points, Formation Control, and the Balancing Problem},
url = {http://dx.doi.org/10.1109/tac.2017.2679073},
volume = {62},
year = {2017},
pdf = {/Publications/Montenbruck_TAC2017.pdf}
}
- S. Zhao and D. Zelazo, “Translational and Scaling Formation Maneuver Control via a Bearing-Based Approach,” IEEE Transactions on Control of Network Systems, 4(3):429–438, 2017.
@article{Zhao2015b_J,
author = {{Zhao}, S. and {Zelazo}, D.},
doi = {10.1109/tcns.2015.2507547},
journal = {IEEE Transactions on Control of Network Systems},
keywords = {Mathematics - Optimization and Control, Computer Science - Systems and Control},
month = sep,
number = {3},
pages = {429--438},
researchtopic = {formationcontrol},
title = {Translational and Scaling Formation Maneuver Control via a Bearing-Based Approach},
url = {http://dx.doi.org/10.1109/tcns.2015.2507547},
volume = {4},
year = {2017},
pdf = {/Publications/Zhao_TCNS2017.pdf},
video = {https://www.youtube.com/watch?v=mR3cwn-r67A}
}
- M. H. Trinh, D. Mukherjee, D. Zelazo, and H.-S. Ahn, “Planar Bearing-only Cyclic Pursuit for Target Capture,” in IFAC World Congress, Toulouse, France, Jul. 2017.
@inproceedings{Trinh2017b,
address = {Toulouse, France},
author = {Trinh, M. H. and Mukherjee, D and Zelazo, D and Ahn, H-S},
booktitle = {IFAC World Congress},
doi = {10.1016/j.ifacol.2017.08.1759},
keywords = {conference},
month = jul,
pages = {10553--10558},
researchtopic = {formationcontrol},
title = {Planar Bearing-only Cyclic Pursuit for Target Capture},
url = {http://dx.doi.org/10.1016/j.ifacol.2017.08.1759},
year = {2017},
pdf = {/Publications/Trinh_IFAC17.pdf}
}
- D. Mukherjee, M. H. Trinh, D. Zelazo, and H.-S. Ahn, “Bearing-only Cyclic Pursuit in 2-D for Capture of Moving Target,” in 57th Israel Annual Conference on Aerospace Sciences , Tel-Aviv, Israel, Feb. 2017.
@inproceedings{Mukherjee2017a,
address = {Tel-Aviv, Israel},
author = {Mukherjee, D and Trinh, M. H. and Zelazo, D and Ahn, H-S},
booktitle = {57th Israel Annual Conference on Aerospace Sciences },
keywords = {conference},
month = feb,
pages = {},
researchtopic = {formationcontrol},
title = {Bearing-only Cyclic Pursuit in 2-D for Capture of Moving Target},
year = {2017},
pdf = {/Publications/Mukherjee_IACAS2017.pdf},
slides = {/Talks/Mukherjee_IACAS2017slides.pdf}
}
- F. Schiano, A. Franchi, D. Zelazo, and P. R. Giordano, “A Rigidity-Based Decentralized Bearing Formation Controller for Groups of Quadrotor UAVs,” in IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, Sep. 2016.
@inproceedings{Schiano2016a,
address = {Daejeon, Korea},
author = {Schiano, Fabrizio and Franchi, Antonio and Zelazo, Daniel and Giordano, {Paolo Robuffo}},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems},
doi = {10.1109/iros.2016.7759748},
keywords = {conference},
month = sep,
pages = {5099--5106},
researchtopic = {formationcontrol, robotics},
title = {{A Rigidity-Based Decentralized Bearing Formation Controller for Groups of Quadrotor UAVs}},
url = {http://dx.doi.org/10.1109/iros.2016.7759748},
year = {2016},
video = {https://homepages.laas.fr/afranchi/robotics/sites/default/files/2016m-SchFraZelRob.mp4},
pdf = {/Publications/Schiano_IROS16.pdf}
}
- S. Zhao and D. Zelazo, “Bearing Rigidity and Almost Global Bearing-Only Formation Stabilization,” IEEE Transactions on Automatic Control, 61(6):1255–1268, 2016.
@article{Zhao2014a_J,
author = {{Zhao}, S. and {Zelazo}, D.},
doi = {10.1109/tac.2015.2459191},
journal = {IEEE Transactions on Automatic Control},
month = jul,
number = {6},
pages = {1255--1268},
researchtopic = {formationcontrol},
title = {Bearing Rigidity and Almost Global Bearing-Only Formation Stabilization},
url = {http://dx.doi.org/10.1109/tac.2015.2459191},
volume = {61},
year = {2016},
pdf = {/Publications/Zhao_TAC2016.pdf},
video = {https://www.youtube.com/watch?v=V7fZMoI4wuY}
}
- S. Zhao and D. Zelazo, “Localizability and distributed protocols for bearing-based network localization in arbitrary dimensions,” Automatica, 69:334–341, 2016.
@article{Zhao2015a_J,
author = {{Zhao}, S. and {Zelazo}, D.},
doi = {10.1016/j.automatica.2016.03.010},
issue = {},
journal = {Automatica},
keywords = {Mathematics - Optimization and Control, Computer Science - Systems and Control},
month = jul,
pages = {334--341},
researchtopic = {formationcontrol},
title = {{Localizability and distributed protocols for bearing-based network localization in arbitrary dimensions}},
url = {http://dx.doi.org/10.1016/j.automatica.2016.03.010},
volume = {69},
year = {2016},
pdf = {/Publications/Zhao_AUT2016.pdf}
}
- D. Mukherjee, M. H. Trinh, D. Zelazo, and H.-S. Ahn, “Robustness of Heterogeneous Cyclic Pursuit,” in 56th Israel Annual Conference on Aerospace Sciences , Tel-Aviv, Israel, Feb. 2016.
@inproceedings{Mukherjee2016IACAS,
address = {Tel-Aviv, Israel},
author = {Mukherjee, D and Trinh, M. H. and Zelazo, D and Ahn, H-S},
booktitle = {56th Israel Annual Conference on Aerospace Sciences },
keywords = {conference},
month = feb,
pages = {},
researchtopic = {formationcontrol},
title = {Robustness of Heterogeneous Cyclic Pursuit},
year = {2016},
pdf = {/Publications/Mukherjee_IACAS2016.pdf}
}
- O. Rozenheck, “Distance-Constrained Formation Tracking Control,” mastersthesis, Technion - Israel Institute of Technology, Aerospace Engineering Department, 2016.
@thesis{Rozenheck2016,
author = {Rozenheck, Oshri},
title = {Distance-Constrained Formation Tracking Control},
school = {Technion - Israel Institute of Technology, Aerospace Engineering Department},
year = {2016},
type = {mastersthesis},
researchtopic = {thesis, formationcontrol},
pdf = {/Theses/Thesis_Rozenheck.pdf}
}
- M. M. Montenbruck, D. Zelazo, and F. Allgöwer, “Retraction Balancing and Formation Control,” in 54th IEEE Conference on Decision and Control, Osaka, Japan, Dec. 2015.
@inproceedings{Montenbruck2015,
address = {Osaka, Japan},
author = {Montenbruck, Maximillian M. and Zelazo, Daniel and Allg\"{o}wer, Frank},
booktitle = {54th IEEE Conference on Decision and Control},
doi = {10.1109/cdc.2015.7402784},
keywords = {conference},
month = dec,
pages = {3645--3650},
researchtopic = {formationcontrol},
title = {{Retraction Balancing and Formation Control}},
url = {http://dx.doi.org/10.1109/cdc.2015.7402784},
year = {2015},
pdf = {/Publications/Montenbruck_CDC15.pdf}
}
- D. Zelazo, P. R. Giordano, and A. Franchi, “Bearing-Only Formation Control Using an SE(2) Rigidity Theory,” in 54th IEEE Conference on Decision and Control, Osaka, Japan, Dec. 2015.
@inproceedings{Zelaxo2015c1,
address = {Osaka, Japan},
author = {Zelazo, Daniel and Giordano, {Paolo Robuffo} and Franchi, Antonio},
booktitle = {54th IEEE Conference on Decision and Control},
doi = {10.1109/cdc.2015.7403182},
keywords = {conference},
month = dec,
pages = {6121--6126},
researchtopic = {formationcontrol},
title = {{Bearing-Only Formation Control Using an $SE(2)$ Rigidity Theory}},
url = {http://dx.doi.org/10.1109/cdc.2015.7403182},
year = {2015},
pdf = {/Publications/Zelazo_CDC15.pdf}
}
- S. Zhao and D. Zelazo, “Bearing-Based Formation Stabilization with Directed Interaction Topologies,” in 54th IEEE Conference on Decision and Control, Osaka, Japan, Dec. 2015.
@inproceedings{Zhao2015c1,
address = {Osaka, Japan},
author = {Zhao, Shiyu and Zelazo, Daniel},
booktitle = {54th IEEE Conference on Decision and Control},
doi = {10.1109/cdc.2015.7403181},
keywords = {conference},
month = dec,
pages = {6115--6120},
researchtopic = {formationcontrol},
title = {{Bearing-Based Formation Stabilization with Directed Interaction Topologies}},
url = {http://dx.doi.org/10.1109/cdc.2015.7403181},
year = {2015},
pdf = {/Publications/Zhao_CDC15.pdf}
}
- S. Zhao and D. Zelazo, “Bearing-Based Formation Maneuvering,” in IEEE International Symposium on Intelligent Control, Sydney, Australia, Sep. 2015.
@inproceedings{Zhao2015c2,
address = {Sydney, Australia},
author = {Zhao, Shiyu and Zelazo, Daniel},
booktitle = {IEEE International Symposium on Intelligent Control},
doi = {10.1109/isic.2015.7307285},
keywords = {conference},
month = sep,
pages = {658--663},
researchtopic = {formationcontrol},
title = {{Bearing-Based Formation Maneuvering}},
url = {http://dx.doi.org/10.1109/isic.2015.7307285},
year = {2015},
pdf = {/Publications/Zhao_ISIC15.pdf},
video = {https://www.youtube.com/watch?v=yBLYSC9Ck6M}
}
- O. Rozenheck, S. Zhao, and D. Zelazo, “A Proportional-Integral Controller for Distance-Based Formation Tracking,” in European Control Conference, Linz, Austria, Jul. 2015.
@inproceedings{Rozenheck2014b,
address = {Linz, Austria},
author = {Rozenheck, Oshri and Zhao, Shiyu and Zelazo, Daniel},
booktitle = {European Control Conference},
doi = {10.1109/ecc.2015.7330781},
keywords = {conference},
month = jul,
pages = {1687--1692},
researchtopic = {formationcontrol},
title = {{A Proportional-Integral Controller for Distance-Based Formation Tracking}},
url = {http://dx.doi.org/10.1109/ecc.2015.7330781},
year = {2015},
slides = {/Talks/ECC15_Rozenheck.pdf},
pdf = {/Publications/Rozenheck_ECC15.pdf}
}
- S. Zhao and D. Zelazo, “Bearing-Based Distributed Control and Estimation of Multi-Agent Systems,” in European Control Conference, Linz, Austria, Jul. 2015.
@inproceedings{Zhao2014a,
address = {Linz, Austria},
author = {Zhao, Shiyu and Zelazo, Daniel},
booktitle = {European Control Conference},
doi = {10.1109/ecc.2015.7330866},
keywords = {conference},
month = jul,
pages = {2207--2212},
researchtopic = {formationcontrol},
title = {{Bearing-Based Distributed Control and Estimation of Multi-Agent Systems}},
url = {http://dx.doi.org/10.1109/ecc.2015.7330866},
year = {2015},
pdf = {/Publications/Zhao_ECC15.pdf},
slides = {/Talks/ECC2015_Zhao.pdf}
}
- O. Rozenheck, S. Zhao, and D. Zelazo, “Formation Velocity Tracking with Proportional Control,” in 55th Israel Annual Conference on Aerospace Sciences , Haifa, Israel, Feb. 2015.
@inproceedings{Rozenheck2014a,
address = {Haifa, Israel},
author = {Rozenheck, Oshri and Zhao, Shiyu and Zelazo, Daniel},
booktitle = {55th Israel Annual Conference on Aerospace Sciences },
keywords = {conference},
month = feb,
pages = {},
researchtopic = {formationcontrol},
title = {{Formation Velocity Tracking with Proportional Control}},
year = {2015},
pdf = {/Publications/Rozenheck_IACAS2015.pdf}
}
- D. Zelazo, A. Franchi, H. H. Bülthoff, and P. Robuffo Giordano, “Decentralized Rigidity Maintenance Control with Range-only Measurements for Multi-Robot Systems,” International Journal of Robotics Research, 34(1):105–128, 2015.
@article{Zelazo2013a_J,
author = {Zelazo, Daniel and Franchi, Antonio and B\"{u}lthoff, Heinrich H and {Robuffo Giordano}, Paolo},
doi = {10.1177/0278364914546173},
journal = {International Journal of Robotics Research},
month = jan,
number = {1},
pages = {105--128},
researchtopic = {formationcontrol, robotics},
title = {{Decentralized Rigidity Maintenance Control with Range-only Measurements for Multi-Robot Systems}},
url = {http://dx.doi.org/10.1177/0278364914546173},
volume = {34},
year = {2015},
pdf = {/Publications/Zelazo_IJRR2015.pdf},
video = {https://www.youtube.com/watch?v=-6F4FazmnYg}
}
- D. Zelazo, A. Franchi, and P. R. Giordano, “Rigidity Theory in SE(2) for Unscaled Relative Position Estimation Using Only Bearing Measurements,” in European Control Conference, Strasbourg, France, Jun. 2014.
@inproceedings{Zelazo2014,
address = {Strasbourg, France},
author = {Zelazo, Daniel and Franchi, Antonio and Giordano, Paolo Robuffo},
booktitle = {European Control Conference},
doi = {10.1109/ECC.2014.6862558},
isbn = {978-3-9524269-1-3},
keywords = {conference},
month = jun,
pages = {2703--2708},
researchtopic = {formationcontrol},
title = {{Rigidity Theory in SE(2) for Unscaled Relative Position Estimation Using Only Bearing Measurements}},
url = {http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=6862558},
year = {2014},
slides = {/Talks/ECC2014_BearingRigid.pdf},
pdf = {/Publications/Zelazo_ECC14.pdf}
}
- D. Zelazo, A. Franchi, F. Allgöwer, H. H. Bülthoff, and P. Robuffo Giordano, “Rigidity Maintenance Control for Multi-Robot Systems,” in Proceedings of Robotics: Science and Systems, Sydney, Australia, Jul. 2012.
@inproceedings{Zelazo2012c,
address = {Sydney, Australia},
author = {Zelazo, Daniel and Franchi, Antonio and Allg\"{o}wer, Frank and B\"{u}lthoff, Heinrich H and {Robuffo Giordano}, Paolo},
booktitle = {Proceedings of Robotics: Science and Systems},
doi = {10.15607/rss.2012.viii.060},
keywords = {conference},
pages = {473--480},
researchtopic = {formationcontrol, robotics},
title = {{Rigidity Maintenance Control for Multi-Robot Systems}},
url = {https://www.roboticsproceedings.org/rss08/index.html},
year = {2012},
month = jul,
pdf = {/Publications/Zelazo_RSS12.pdf}
}
- D. Zelazo and F. Allgöwer, “Growing Optimally Rigid Formations,” in American Control Conference, Montreal, Canada, 2012.
@inproceedings{Zelazo2012,
address = {Montreal, Canada},
author = {Zelazo, Daniel and Allg\"{o}wer, Frank},
booktitle = {American Control Conference},
doi = {10.1109/acc.2012.6315460},
file = {:Users/danielzelazo/Dropbox/Research/Mendeley Paper Database/Zelazo, Allg\"{o}wer/2012 American Control Conference/Zelazo, Allg\"{o}wer - 2012 - Growing Optimally Rigid Formations.pdf:pdf},
keywords = {conference},
pages = {3901--3906},
researchtopic = {formationcontrol},
title = {{Growing Optimally Rigid Formations}},
url = {http://dx.doi.org/10.1109/acc.2012.6315460},
year = {2012},
pdf = {/Publications/Zelazo_ACC12.pdf}
}
- D. Zelazo, A. Rahmani, J. Sandhu, and M. Mesbahi, “Decentralized Formation Control via the Edge Laplacian,” in American Control Conference, Seattle, WA, Jun. 2008.
@inproceedings{Zelazo2008a,
address = {Seattle, WA},
author = {Zelazo, Daniel and Rahmani, Amirreza and Sandhu, Jasmine and Mesbahi, Mehran},
booktitle = {American Control Conference},
doi = {10.1109/ACC.2008.4586588},
isbn = {978-1-4244-2078-0},
keywords = {conference},
month = jun,
pages = {783--788},
researchtopic = {formationcontrol, nds},
title = {{Decentralized Formation Control via the Edge Laplacian}},
url = {http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=4586588},
year = {2008},
pdf = {/Publications/Zelazo_ACC08.pdf}
}