About Me :
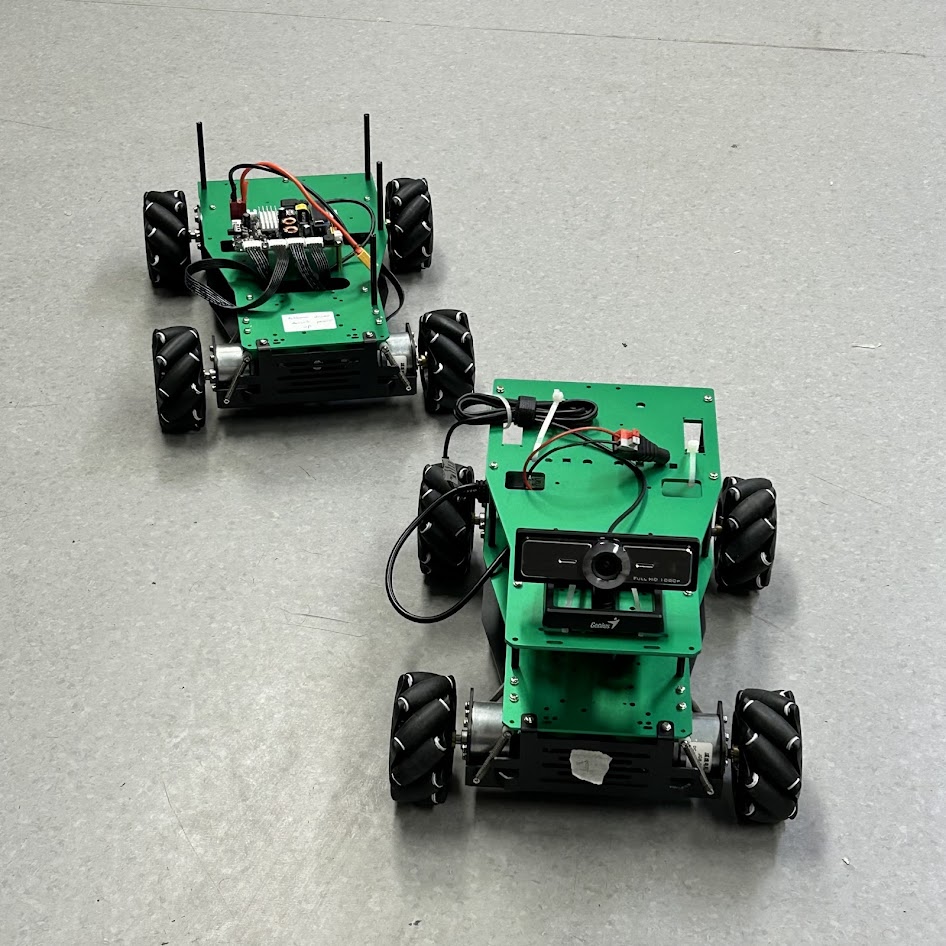
I am a robot platform designed to validate pure integrator dynamics for initial control model evaluations. Equipped with mechanum wheels, I have the ability to move unconstrained in a 2D frame. Additionally, I can be equipped with additional hardware and tools for network sensing and participation.