Our Mission
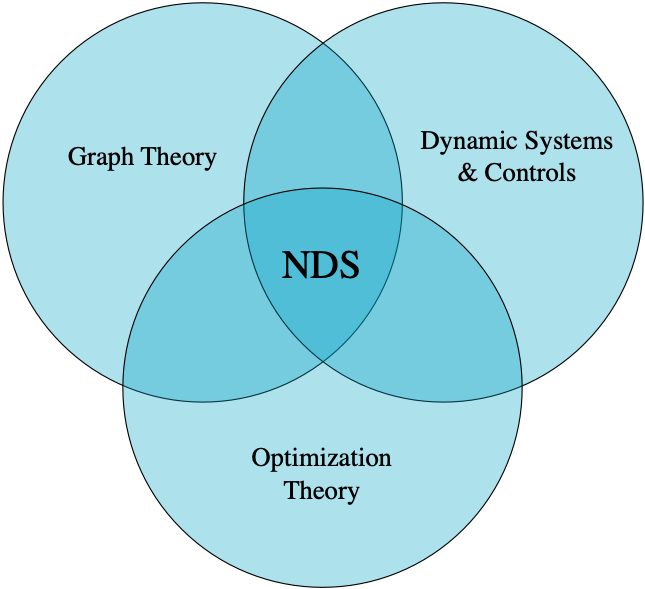
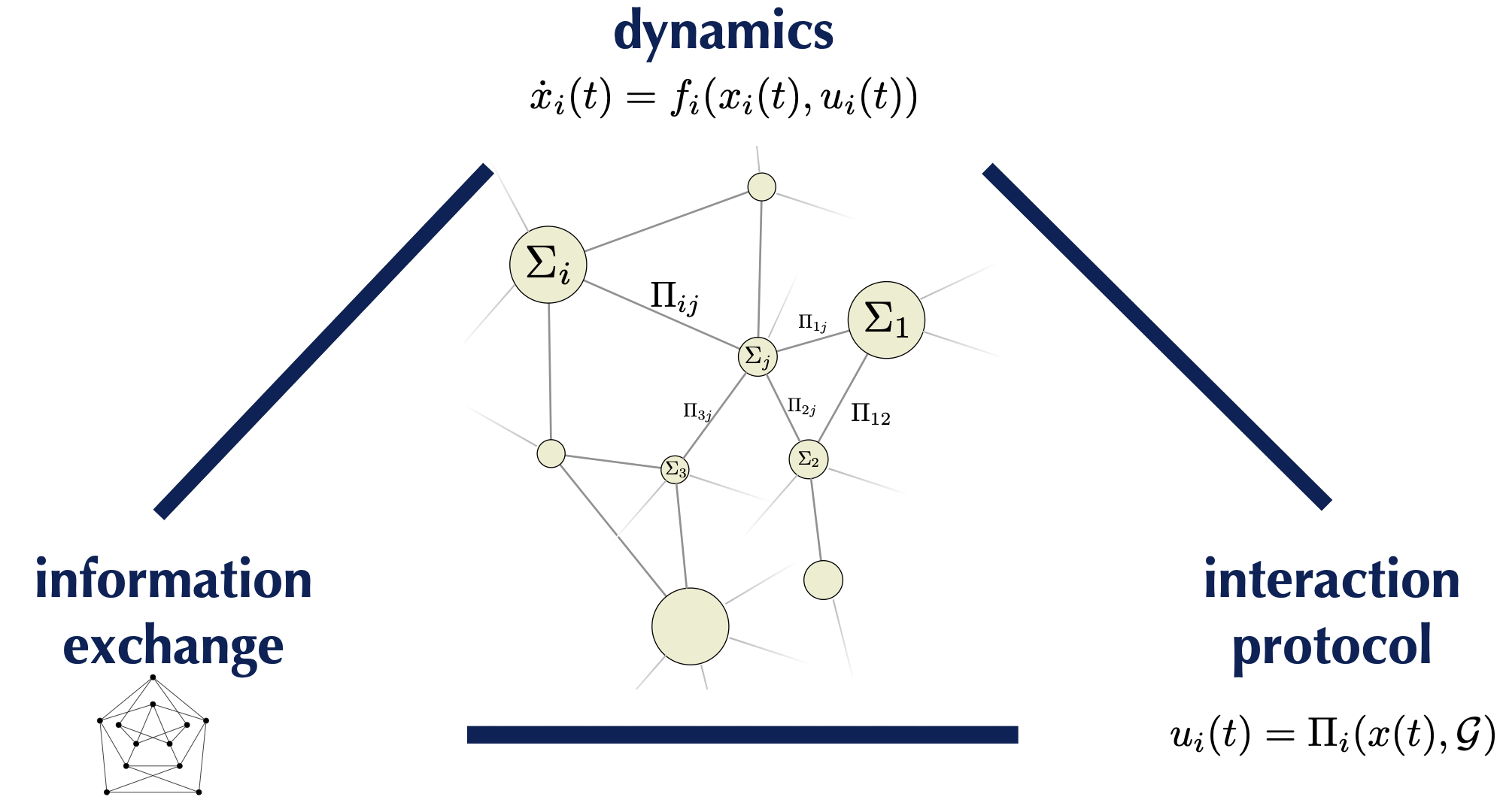
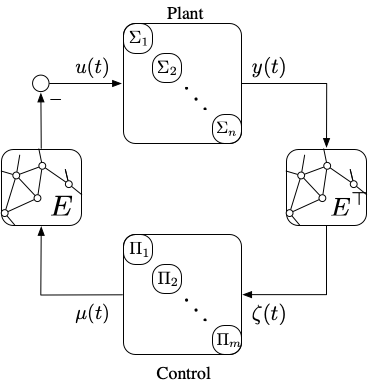
The Cooperative Networks and Controls (ConNeCt) lab focuses on the control and coordination of multi-agent systems. Our approach for studying these systems is through a blend of systems and control theory with graph theory. While our heart and soul rests in the fundamental and theoretical challenges of networked systems, we also consider their real-world application through a robotic testbed consisting of ground and aerial vehicles.
The Connect lab is a research group in the Stephen B. Klein Faculty of Aerospace Engineering at the Technion - Israel Institute of Technology. Our team consists of students from across the Technion and researchers from around the world. Our physical home is within the Philadelphia Flight Control Laboratory. Come visit!
We are always looking for highly-motivated individuals to join our group, see details here.

Latest News:
-
Two papers accepted to the European Control Conference (ECC 2026)
March 19, 2026
New results on agreement protocols and leader identification in networked systems
-
Fengyu Yue presents her work at CDC2025!
December 12, 2025
A Passivity Analysis for Nonlinear Consensus on Digraphs
-
Congratulations to Evyatar Matmon!
December 10, 2025
Evyatar passed his MSc Exam.
-
Connect Lab BBQ!
November 3, 2025
Social gathering at Carmel beach
-
Congratulations to Solomon on PhD Candidacy Exam!
November 3, 2025
Solomon passed his PhD candidacy exam.
-
New paper on bearing-only formation control over directed graphs!
October 15, 2025
To appear in the IEEE Transactions on Control of Network Systems
-
Congratulations to Dr. Gal Barkai!
October 15, 2025
Gal passed his PhD Exam.
-
Organizing IFAC2026 Open Invited Track
September 17, 2025
Advances in Rigidity Theory, Multi-Agent Formations, and Distributed Localization
-
Giving a talk at TU Hamburg 30.7.25
July 30, 2025
I will speak about symmetry-forced formation control.
-
New paper on A Passivity Analysis for Nonlinear Consensus on Digraphs!
July 20, 2025
To appear in the European Journal of Control